Research
This space features my completed projects and publications. If any catch your interest, don’t hesitate to reach out.
Click the featured images to navigate to the corresponding repositories/branches for details.
My publications are also listed at the end of each project.
Direct Position Estimation
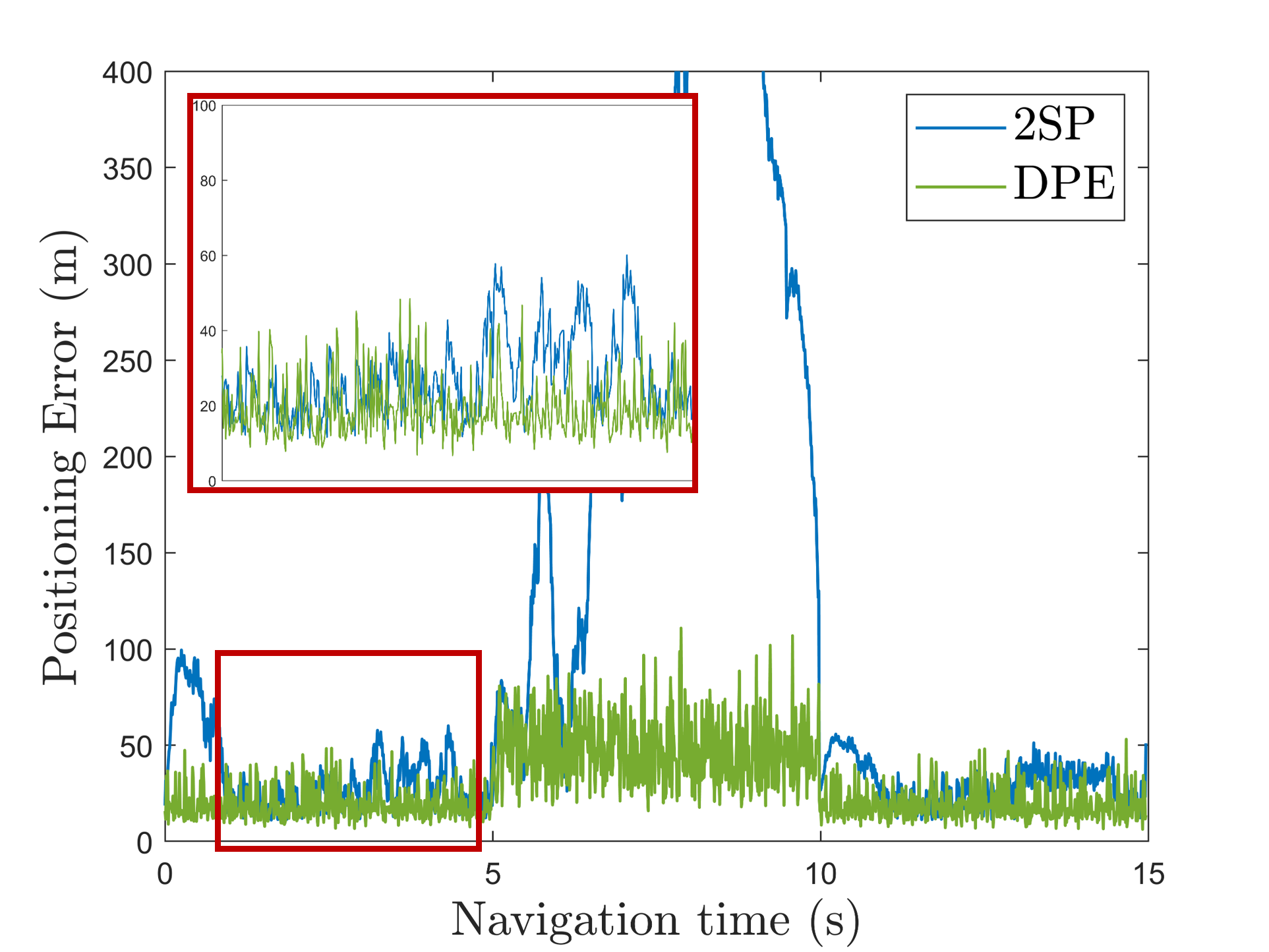
Direct Position Estimation (DPE) is a high-sensitivity receiver design, particularly effective in GNSS applications. Unlike traditional methods, the DPE algorithm solves for PVT directly from raw satellite signals, withou estimating intermediate quantities, e.g. pseudorange and carrier phase.
Our initial and “naive” idea is that traditional positioning techniques developed over past decades can also enhance the existing DPE approach.
Standard DPE
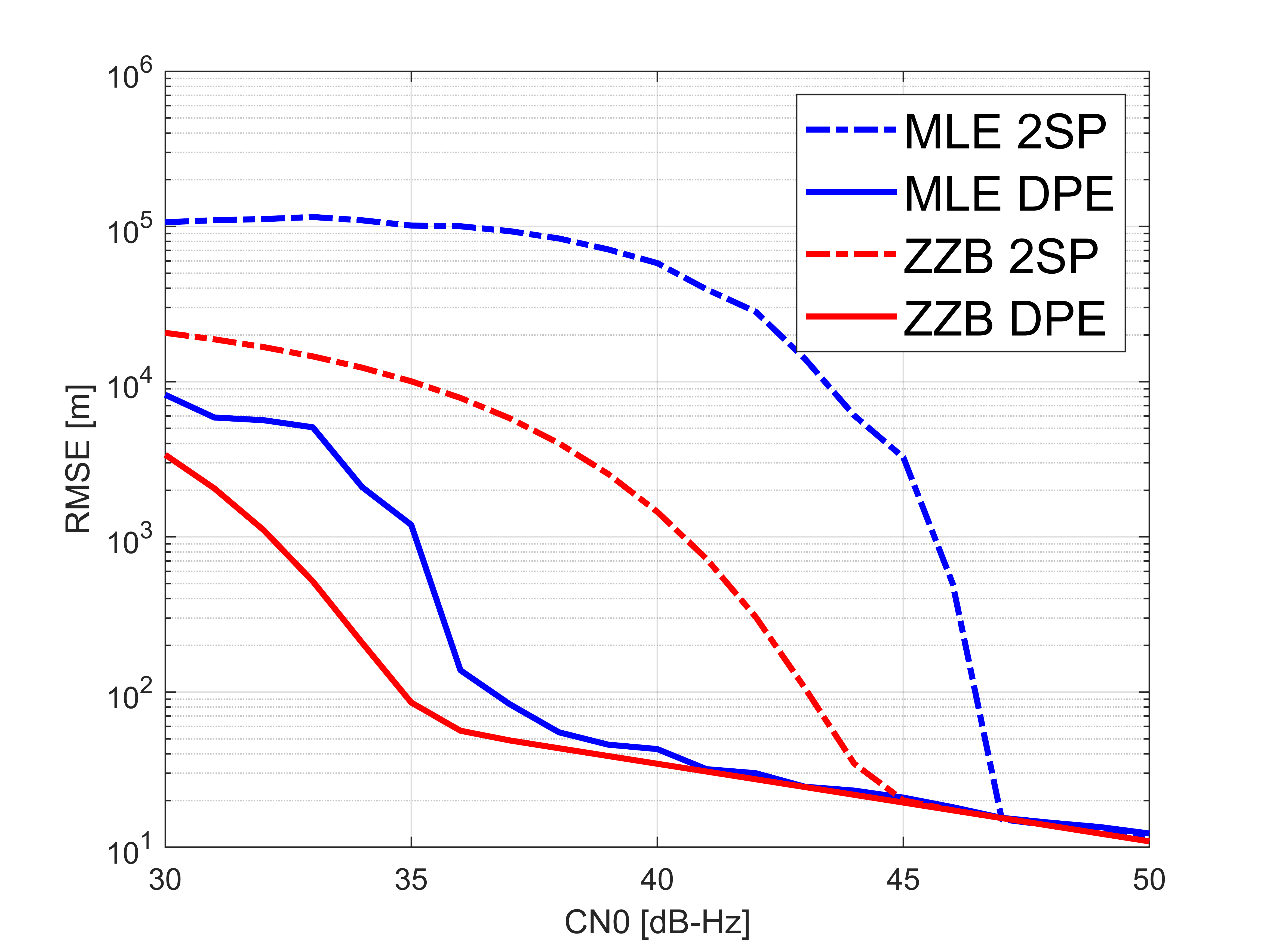
DPE in the GNSS context was first proposed by Prof. Pau Closas. The standard DPE approach demonstrates that the DPE outperforms the traditional two-step approach in term of position precision.
Precise DPE
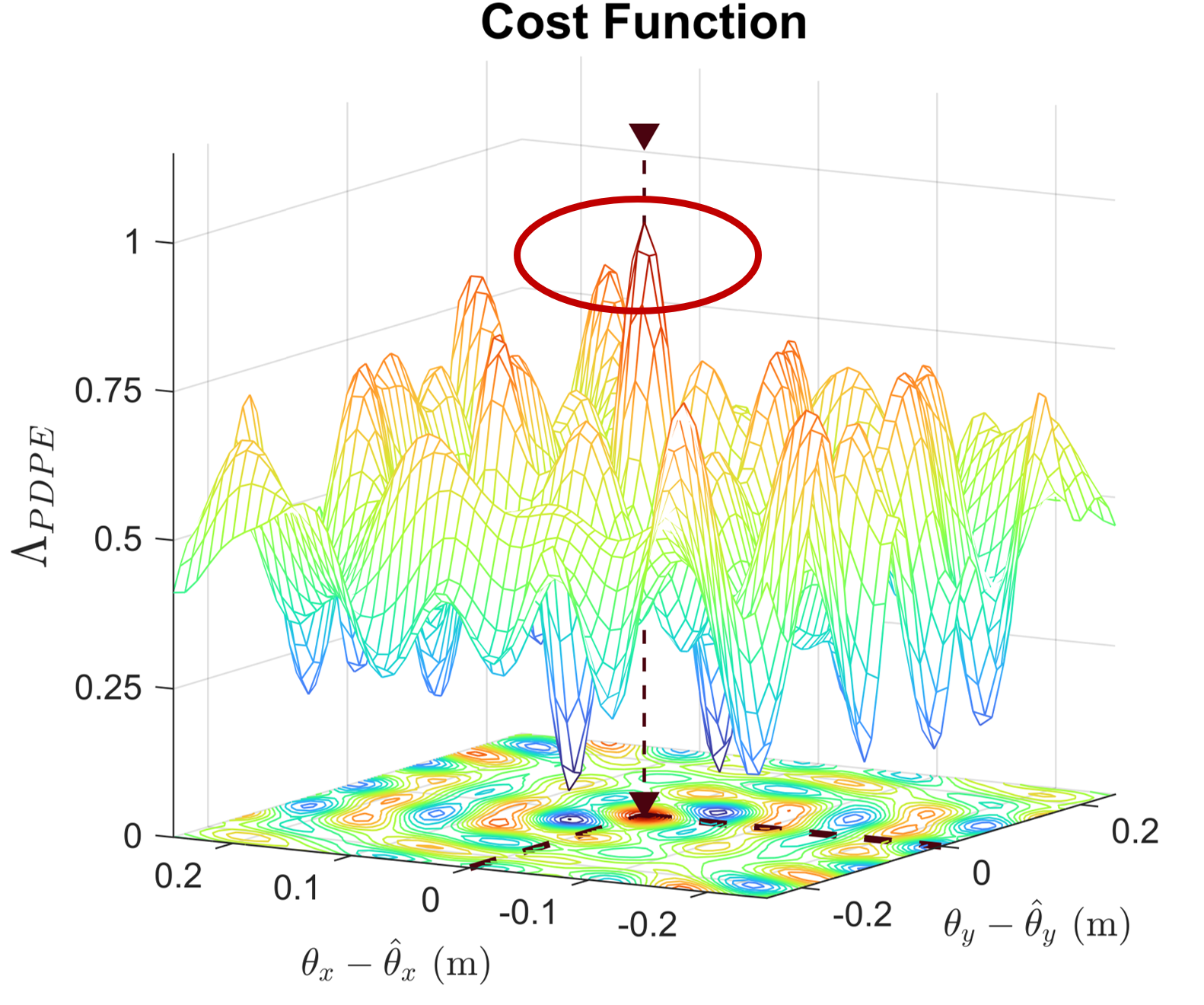
PDPE is an extension of DPE by leveraging the carrier phase information of the reveived signal to achieve high-precision positioning and keep the high-sensitivity property.
RIM DPE
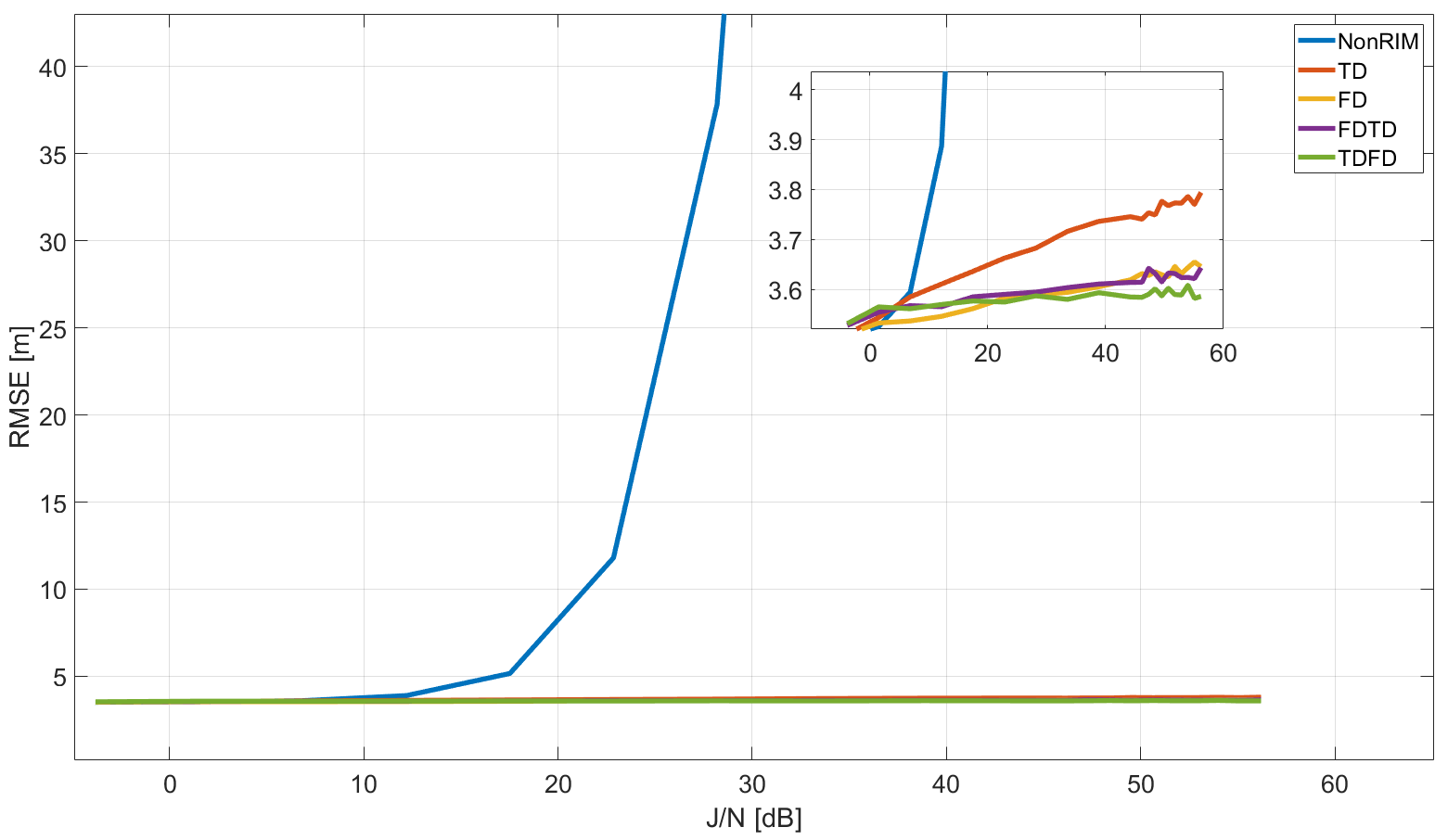
RIM refers to robust interference mitigation. RDPE utilizes Zero Memory Non-Linearity (ZMNL) filters, such as estimation based on Huber’s non-linearity, to improve interference tolerance.
Multipath Mitigation Analysis
DPE itself has the nature of mitigating the effect of multipath by fusing the information of each satellite at an earlier stage. We demonstartes this ability by plotting multipath error evenlope and simulating in LMSCM (Land Mobile Satellite Channel Model) from DLR (German Aerospace Center).
SD-DPE
Single difference DPE employs the DGPS (Differential GPS) technique in DPE context. The signal received at the reference receiver, or reconstructed from the base station can be collected to reduce the common error in the rover receiver and enable the precise positioning.
Physics-informed learning
Augmented physics-based model (APBM) is a hybrid physics-based data-driven model, which is capable of learning complex state dynamics while maintaining some level of model interpretability by keeping the physics knowledge.
APBM
We consider APBM as a physics-based model plus a nerual network, e.g. Multilayer perceptron. Due to the nonlinearity of the model, the Cubature Kalman filter is usually implemented to performing the state estimate and learning process. Besides, we extend the APBM to the high-order Markovity and noise identification problems.
Cognitive Radar
Cognitive radars refer to the radars that can adaptively change its parameters, e.g. the location of the radar, the waveform, and power of the transmitting signals, to achieve better tracking performance in a closed loop through optimization principles. This capability of responding to the dynamic target through waveform agility also enables the detection of the cognitive behavior of the radar from the target side.
Cognitive Radar Identification
A beamformer is designed to passively perceive the behavior of the radar. TO identify the cognitive radar, mutual Information (with Anderson–Darling test) and causality inference (more robust) are employed to make the decision.
Misspecified Bayesian Cramér-Rao bound
Model misspecification happens when the assumed model, which is used to derived the estimator, and the true model, which generates the data, are not consitent. In this case, the estimator is no longer an unbiased estimator w.r.t the true parameter and the standard Cramér-Rao bound cannot lower-bound the estimation error.
MBCRB
We extend the MCRB to its Bayesian version, allowing for model misspecification in the prior information. The standard Bayesian CRB is not valid under model misspecification.